
|
|
|
Главная Микропроцессорные системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [ 63 ] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] Детализация программы рассмотренного алгоритма поиска.в значительной мере повторяет элементы и блоки разрабатываемых выше программ и поэтому здесь не приводится. Из результатов детализации следует, что этот алгоритм укладывается примерно в 60 ячеек ПЗУ и не требует дополнительной оперативной памяти, так как при выполнении программного блока «Поиск» освобождаются все ячейки ОЗУ, используемые в последующей программе измерения. Кроме того, дополнительные затраты времени вычислений (составляющие примерно 200 тактов за один период Г=1667 мкс) в данном случае не являются определяющими, так как при хорошем качестве измерений поиск сигнала осуществляется очень редко и не приводит к существенному увеличению общих временных затрат. В то же время программный поиск приводит к существенному сокращению аппаратурных затрат из-за отсутствия многоканального накопителя и схем управления и коммутации преобразователя время - код. Это сокращение заметно превышает дополнительные затраты по увеличению требуемого объема ПЗУ. Таким образом, в результате корректировки можно остановиться на варианте с программным последовательным поиском. Однако для принятия окончательного решения следует проанализировать качественные характеристики процедуры последовательного поиска с учетом заданных требований к времени поиска и достоверности обнаружения. Такой анализ означает возврат ко второму этапу проектирования (см. рис. 5.1) и выходит за рамки данной работы. Рассмотренный пример не только иллюстрирует весь путь проектирования микропроцессорной системы - от математического описания алгоритма до принятия решения о практическом его воплощении, но и показывает широкие возможности программных методов обработки сигналов в РТС. Дополнительные возможности обработки, которые открываются в связи с применением микропроцессорной техники, подтверждаются далее на других примерах, рассматриваемых, правда, не столь подробно. 5.3. устройство амплитудной ОБРАБОТКИ СИГНАЛОВ РТС В Предыдущем разделе рассмотрена методика микропроцессорной реализации алгоритмов обработки, основанных на измерении временных параметров сигнала. Другой важный класс алгоритмов основан на использовании амплитудной информации, содержащейся в принимаемом Сигнале. С их помощью решаются задачи фиксации максимума, минимума или «центра тяжести» сигнального импульса в амплитудных методах пеленго- 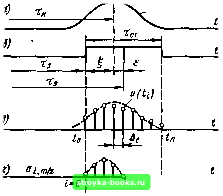 Рис. 5.10. Временные диаграммы к принципу амплитудной обработки сигнала вания, фиксация пересечения нулевого уровня синусоидальным сигналом в фазовых измерителях и т. п. Методы решения этих задач имеют общие характерные черты, которые для наглядности будут рассмотрены на примере измерения азимута цели в радиолокационной системе с равномерным обзором. Пусть задана форма полезного сигнала s{t-Ти) (рис. 5.10,а), которая определяется диаграммой направленности вращающейся антенны, а неизвестный временной сдвиг Ти характеризует величину угла в между заданным опорным направлением антенны (например, се- 13-43 193 верным) и направлением на объект измерения (ти= =7обв°/360, где Гоб - период обзора пространства). Для измерения информационного параметра Ти в условиях помех производится предварительная селекция (т. е. поиск и обнаружение) сигнала с точностью до длительности строба Тст (рис. 5.10,6). Задачей измерительного устройства является уточнение временного положения сигнала в пределах строба, т. е. оценка значения е=Ти-Тэ или §=е-)-тст/2=Ти-Тз (рис. 5.10,в), где Тз= =тэ-Тст/2 - интервал задержки строба относительно известной точки начала отсчета, Тэ - экстраполированное значение измеряемого временного интервала. Для решения этой задачи цифровыми средствами используется совокупность дискретных выборочных значений принимаемой смеси сигнала и помех u{ti) = =s{ti-Xs)-\-n(ti), где ti=iAt, А; -период временной дискретизации (рис. 5.10,в). Далее ограничим рассмотрение конкретным примером импульсной РЛС, когда имеет место естественная дискретизация сигнала по времени, причем At=l/F, где F - частота повторения импульсов. Соответствуюший интервал угловой дискретизации вычисляется как А д=360А/Гоб. Например, если принять F~QOQ Гц (как в § 5.2) и скорость вра-шения антенны ©=100 об/мин, то получим А;=1667мкс и Ав=Г. Так же, как и ранее (см. § 5.2), предположим, что этапы формулировки задачи и метода решения уже пройдены, и в результате выбран конкретный алгоритм оценивания, основанный, например, на методе максимального правдоподобия. В соответствии с этим методом оптимальная оценка f временного сдвига полезного сигнала относительно начала строба определяется путем решения уравнения вида [27] " d Е«(Л-л-«(--з)и=,. т=<). (5-5) 1=0 где границы суммирования связаны с временным положением строба, т. е. о==Тз и я=Тз--Тст, причем Тст= =nAf. Задачей последующих этапов проектирования является разработка алгоритма решения уравнения (5.5) с помощью МП, а также разработка соответствующей структуры аппаратной части, осуществляющей взаимодействие МП с радиотехническим трактом. 194 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [ 63 ] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |