
|
|
|
Главная Микропроцессорные системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [ 71 ] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] для сравнения на рис. 5.18. Сравнение подчеркивает специфику программного представления алгоритмов при проектировании микропроцессорных систем в отличие от традиционной аппаратной реализации тех же алгоритмов обработки сигналов. Для дальнейшей конкретизации программного алгоритма рассмотрим подробнее каждый из блоков, представленных на рис. 5.17. /. Определение начальных условий. Этот блок задает исходные значения оцениваемых параметров для Дискримшшр e(i-) Устройство cmpofupoBa-иия Устройство контроля Блок умножения Блок преобразования Блок поиска o(fi) Блок экстропотции Рис. 5.18. Структура следящего измерителя при аппаратной реализации осуществления последующей рекуррентной процедуры. "Обращение к нему происходит или в момент включения системы, или в момент обнаружения каких-либо нарушений измерительного процесса, что при правильной работе измерителя происходит сравнительно редко. Поэтому данный программный блок не оказывает существенного влияния на общие вычислительные затраты и допускает большую свободу выбора при его конкретизации. При полном отсутствии априорной информации единстен-ным источником начальны сведений о векторе состояния а(0) = [л:„(0), V;t(0), г/»(0),У (0)] может служить первое наблюдение информационных параметров р (0) = (0), 1(0), Ыу(0), Ыу(О)], связанных с компонентами вектора а(0) нелинейным оператором (5.13). При этом начальные условия определяются как р (0) sin 8 (0) K(0)sin4?(0) p(0)cos8(0) V (0) cos Ч? (0) a(0)=:G-{C-p(0)} = Хм О где - нелинейный оператор, обратный G{-} и определяемый, исходя из геометрических соображений (см. рис. 5.15). Начальный вектор наблюдения р(0) состоит из радиотехнических и нерадиотехнических компонентов. Специфика радиотехнических измерений заключается в том, что операции точного измерения, как правило, предшествует операция поиска и обнаружения полезного сигнала, которая включает в себя грубое определение неизвестных параметров сигнала. В данном случае принимаемый сигнал содержит два информационных параметра - и (см. рис. 5.16), и поэтому операция поиска сигнала должна заканчиваться выработкой двух значений (0) и (0), которые используются в дальнейшем для вычисления начальных условий. Один из возможных способов осуществления операции поиска основывается на использовании процедуры многоканального бинарного накопления импульсных сигналов. Аппаратная реализация такого способа с учетом особенностей ввода данных в цифровое вычислительное устройство рассмотрена в § 5.2, где основное внимание уделено измерению задержки принятого сигнала относительно запросного импульса, т. е. определению компонента Тр (0). В данном случае одновременно с измерением Хр(0) Б процессе поиска и обнаружения сигнала необходимо измерить также величину т Q (0), характеризующую задержку принятой пачки импульсных сигналов относительно опорного момента времени, задаваемого „северным" сигналом (см.рис.5.16). Выполнение этой операции основывается на использовании многоканального бинарного накопителя в качестве обнаружителя пачек импульсных сигналов (см.§.4.2). Напомним, что момент появления импульса на выходе накопителя одновременно характеризует и величину задержки х (с точностью до интервала дискретизации Ар), и величину задерукки (с точностью до длительности пачки принятых сигналов). Следовательно, для определения начальных значений (0) и (0) необходимо осуществить две операции преобразования время -код и соответственно две операции обмена данными между вычислительным устройством и радиотехническим трактом. Метод осуществления этих операций подробно рассмотрен в § 5.2, поэтому здесь следует лишь отметить, что 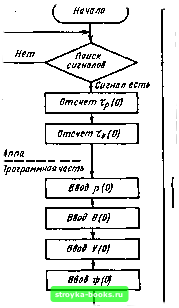
ратная часть [весф}
Рис. 5.19. Программный блок определения начальных условий В данном случае соответствующие аппаратурные и вычислительные затраты примерно удваиваются, поскольку кроме дальности р измеряется также и азимут 6. Наряду с определением радиотехнических компонентов вектора начальных данных Э(0) первый-программный блок включает в себя операции ввода в вычислительное устройство данных и У(0) от автономных средств. Эти операции подразумевают предварительное 218 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [ 71 ] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |
||||||||||||||||||||||