
|
|
|
Главная Микропроцессорные системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [ 76 ] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] ции подобных явлений служит программный блок «Управление измерителем». 8. Управление измерителем. Алгоритм управления основывается на использовании полученных из предыдущего программного блока значений операндов Zpt, Zrp и Zv, которые можно назвать индикаторами достоверности данных. Признаком нарушения в каком-либо канале может служить частое появление нулевых значений соответствующего индикатора достоверности. Оценкой частоты является число k нулевых значений за Nk шагов измерения. Если k превышает некоторый критический уровень Кк (выбранный на основе анализа качественных характеристик), го можно принять решение о пару шении работоспособности соответствующего канала. Схема программы, реализующей этот алгоритм, приведена на рис. 5.28. В результате выпслне-ния этого программного блока вырабатываются специальные управляющие сигналы - операнды брт, 6v и 6у, которые можно назвать индикаторами работоспособности, так как единичные значения присваиваются этим операндам в случае подтверждения работоспособности соответствующих каналов измерения на данном цикле управления из Лк шагов. Нулевое значение какого-либо индикатора б(.) свидетельствует О нарушении работоспособности {к(,)Жк за Лк шагов) в соответствующем канале- При фиксации такого события дальнейший алгоритм измерения зависит от конкретных условий функционирования измерительной системы и предъявляемых к ней тактико-технических требований. В простейшем случае управление измерителем при регистрации факта нарушения в каком-либо из каналов сводится к пересмотру 16* 231 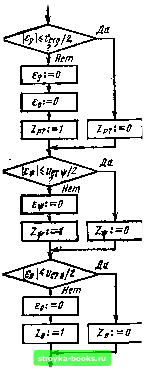 Рис. 5.27. граммного Схема про-алгоритма контроля
Определение начальнык jjcnaSuu  &РГ- = 0 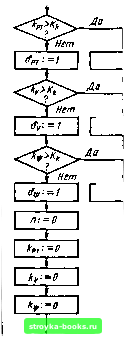 , Нет Г Рис. 5.28. Программный алгоритм управления измерителем начальных условий (как показано на рис. 5.17). При этом можно несколько видоизменить рассмотренный ранее алгоритм определения начальных условий (см. рис. 5.19) так, чтобы проверять исходные данные только в тех каналах, в которых зафиксировано нарушение. Пример такого, более гибкого алгоритма приведен на рис. 5.29, где процедура ввода радиотехнических данных включает в себя операции поиска сигналов и отсчета начальных значений (0) и (0). В приведенной программе опущена операция проверки последнего индикатора 6у так как сам факт обращения к этому программному блоку свидетельствует о том, что хотя бы один из инди- 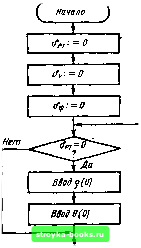 катеров равен нулю, и, следовательно, при невыполнении первых двух условий обязательно должно выполняться условие 64 = 0, т. е. проверка этого условия является излишней. Ясно, что для задания режима определения полной совокупности начальных условий при включении измерителя необходимо осуществить в начале программы обнуление всех индикаторов работоспособности. Рассмотренный здесь алгоритм управления осуществляет локализацию и исправление простейших нарушений работоспособности измерителя, связанных, например, с пропаданиями входных данных под действием различных помех, флюктуации или случайных сбоев в элементах измерителя. На практике, конечно, природа нарушений более разнообразна, и алгоритм управления может выполнять гораздо более сложные функции, такие как диагностика сбоев и отказов, принятие решений о подключении резервных узлов или блоков, выработка аварийных сигналов и т. п. Однако разработка подобных алгоритмов управления составляет специальную область исследования [55- 57]. Здесь можно принять, что управление измерительным процессом сводится к выработке индикаторов нарушений брт, 6v, 84Г и возврату к блоку определения начальных условий. При этом значения брт, 6 и 8 в виде визуальных сигналов выводятся на внешнее устройство (см. программный блок 12) и предупреждают о возникнове-
Сигнала нет  Сигнал есть Рис. 5.29. Управляемый алгоритм определения начальных условий [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [ 76 ] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |
||||||||||||||||||||||||||||||||||||